With the official v2 release of the APM mission planner around the corner, a couple of users have been playing around with it (you can view code here). The main feature of the new mission planner is that it will be cross platform so you can run it natively on your PC, Mac or Linux box. A particularly useful installation of the mission planner was done onto a raspberry Pi, which opens the options of running this on a briefcase type groundstation. Apparently APM mission planner takes about 25 secs to start and runs at an acceptable speed. I guess if you wanted something abit faster you could try running it onto a beaglebone black along with our diversity monitor that accepts HDMI input as the screen (but I am not sure if the 1024x600 px resolution will be large enough to use it comfortably)
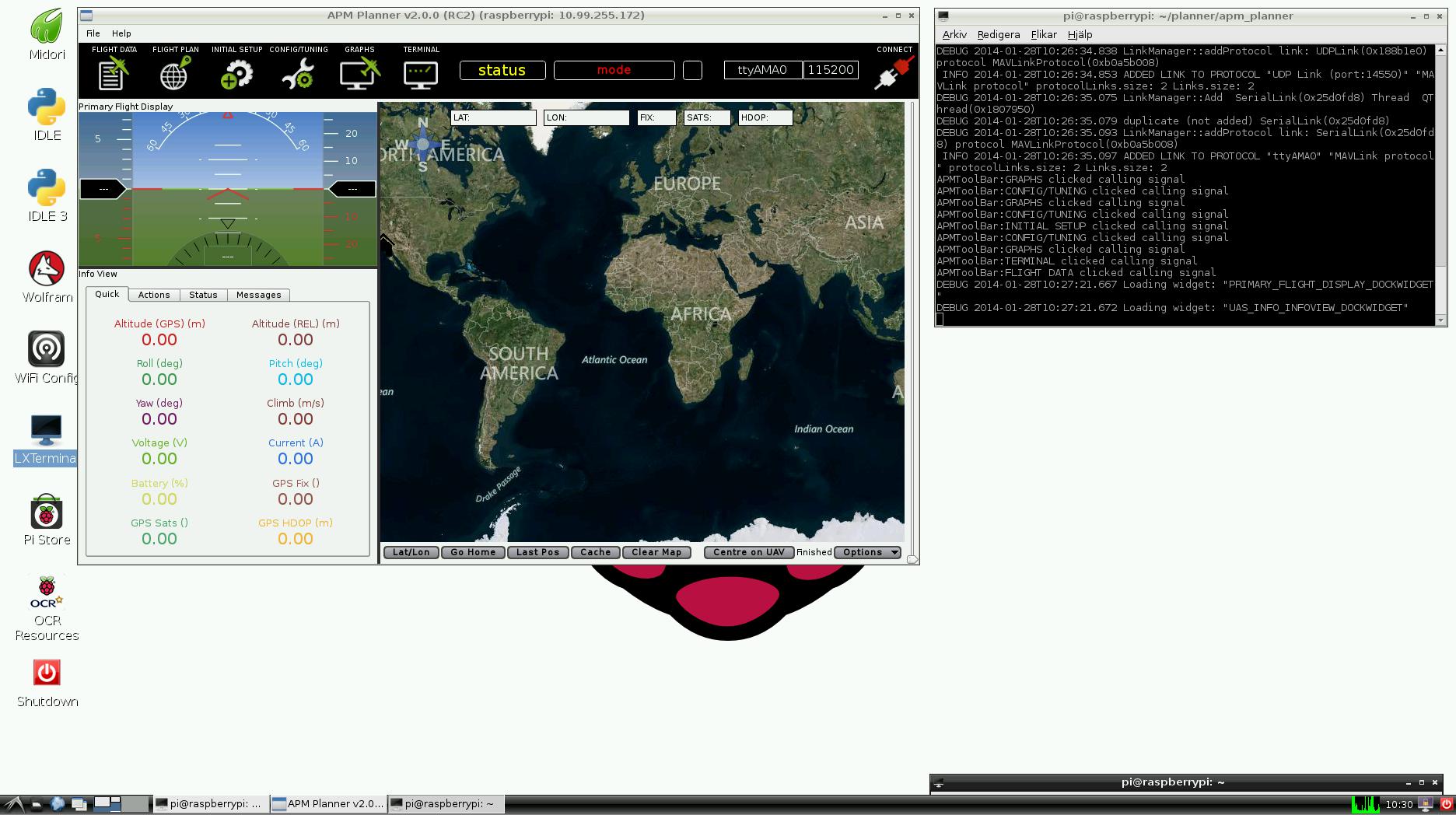
Here are the instructions to get APM planner v2 running on your raspberri pi (thanks to RC Tech)
Getting started
- Raspberry Pi with 32 GB SD card loaded with Raspian
- Added a 4 GB swap per the instructions here: My Raspberry Pi needs a Swap – jermsmit.com (the compilation will run out of memory otherwise)
Installing APM mission planner on raspberry pi
Install the required packages:
sudo apt-get install phonon libqt4-dev \ libphonon-dev libphonon4 phonon-backend-gstreamer \ qtcreator libsdl1.2-dev libflite1 flite1-dev build-essential \ libopenscenegraph-dev libssl-dev
Clone the repository in your workspace:
cd ~/workspace git clone https://github.com/diydrones/apm_planner
Build APM Planner:
cd ~/workspace/apm_planner qmake-qt4 qgroundcontrol.pro
make
Run APM Planner:
./release/apmplanner2

