I’m wondering if my LiPo’s voltage is temporarily dropping because of too much current draw (as I’m hovering at about 11.4) the voltage apparently drops according to my pixhawk power module (on apm 2.6). What I have:
3s (11.1v) 3000mAh 20C battery
4 x (quadcopter) Emax MT2213 935KV motors.
4 x Afro 30A ESC
Pixhawk power module
APM 2.6
Ublox lea-6m GPS
FS-ia6 receiver
No servos
Would that much stuff cause too much current to be drawn causing the voltage to drop around that point? Also, (to unmannedtech) are you not getting the notifications on my earlier posts? It seems like you respond super quickly when posts are new and then later don’t respond (I wonder if you’re not seeing it in your notification bar or something).
Yeah a higher capacity would also increase current output, but then you have a much heavier battery which would require more throttle which uses more current, so best to rather get a higher C battery. Have you found any thrust tables for the motors you are using?
Also, since you guys are saying my LiPo doesn’t have enough power, how much power should it have? Right now you can draw 60A from it (20C continuous discharge at 3 amp-hours.)
The motors will only day about 10A each with 11v battery, assuming you at rising 10x45 props so your battery should be able to handle that. However how hot do your motors get after a flight?
The voltage drops what only a guess as it’s usually the cause of this, especially if the voltage drops with increasing throttle.
Otherwise it could just be a dodgy power module, the o to way to check is to mount your props upside down and/or strap your quad to the ground and connect a voltmeter to the battery while you power it it through the throttle range. If you do this just be careful not to get anything caught in the props!
There is no gold standard for measuring C rating for batteries. Some have way more voltage sag than others rated the same. Sometimes you can use the weight to guess. Higher rating = more weight.
What props ? Seems 1045 is most efficient.
Remember, any motor uses the amps allowed by the internal resistance of the motor. So this could be 20 or 30 amps. But the ESC just pulses those 30A or whatever to make it an average of say 7.5A measured over a periode (0.25s ?) Different firmware, different update rate.
Yes, 1045 props. I really don’t want to buy another 4 ESCs–they’re more expensive than the battery. Also, your link is broken. I think my power module is interpreting the voltage correctly because the voltage goes up and down with ThrOut which seems not like a power module issue. What battery would you recommend I buy? If my motors only draw 10A max each, why is my battery (3ah 20C, that should mean 60A available to be drawn) having voltage sag?
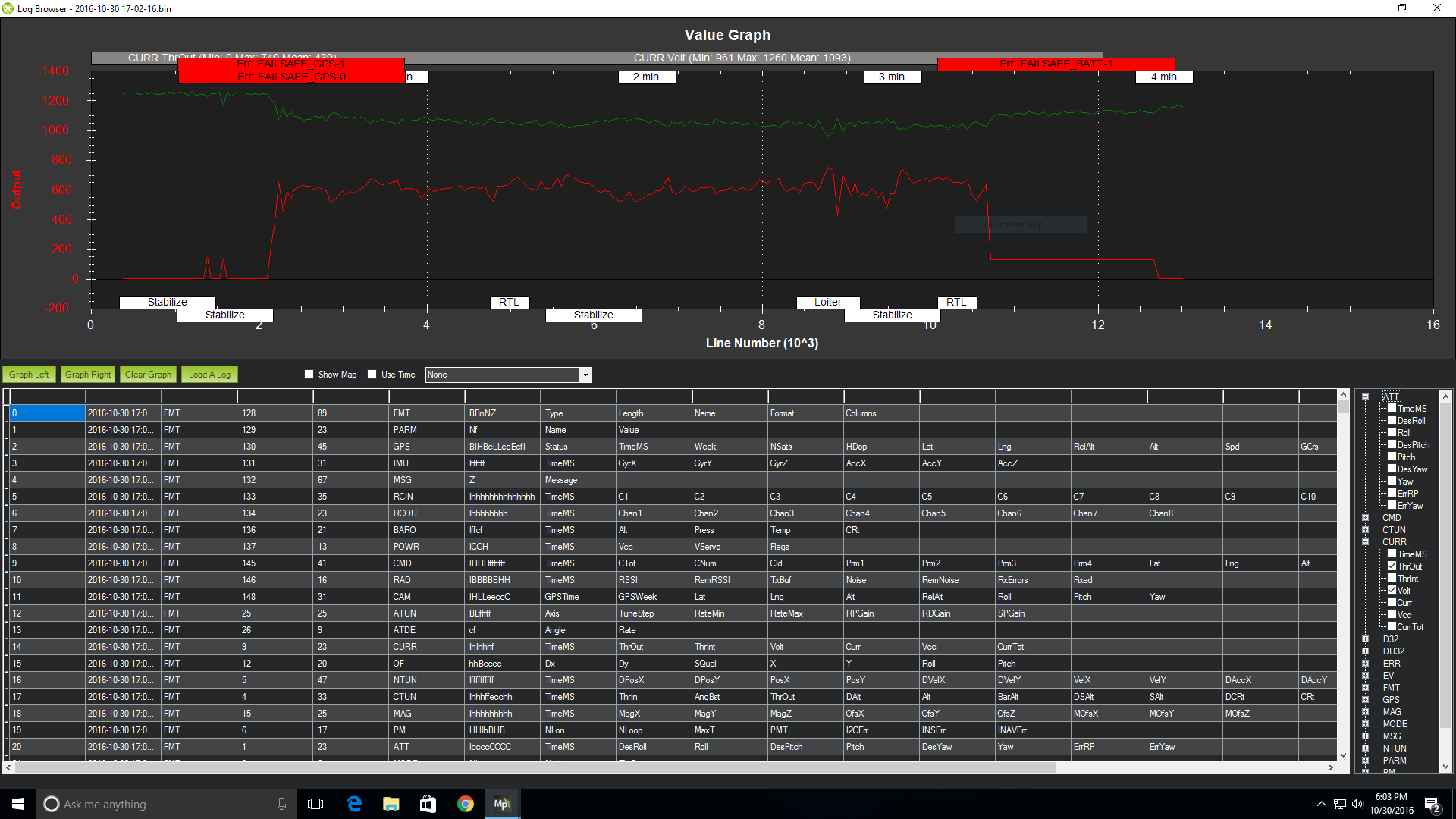
There’s the screenshot, which should be enough. I will find a file hosting place for the .bin file if you really want that. The red line is ThrOut, and the green line is Volt. You can see the voltage dropping as I apply more power.
It says 540, but I think I may have adjusted that number from a different number at some point. I thought that parameter only mattered when I was in loiter or altitude hold, and I almost always fly in stabilize. I am using ArduCopter V3.2.1 which does not include automatic learning of mid. throttle hover. If my battery is the problem, (3ah x 20C = 60A continuous) but each motor only uses 10A ( x 4 = 40A {less than 60A}) plus a flight controller, why is it a problem? And how much more of a powerful battery will I need?