So following on from the receiver fun I had (see this thread) I am not at the point of trying to fly the things, unfortunately at the moment I can’t even get it off the ground as it just keeps flipping as soon as I up the throttle.
I have done the following to try and resolve.
Gone throught the motors tab in Betaflight and powered up each motor in turn and confirmed the position / rotation direction match the diagram at the top.
Carried out the ESC callibration process.
Set the ESC protocol to DShot300 which is listed on the page for my ESCs (Chaos BLHeli_S Dshot ESC) as compatible).
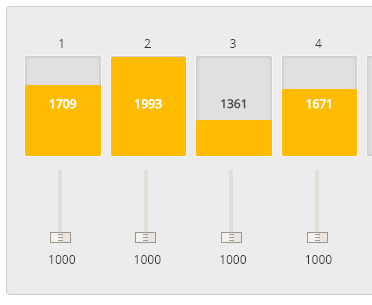
The only thing I have noticed out of the ordinary is that the motors don’t throttle up evenly, for example at full throttle sat on level ground this is what shows in BetaFlight
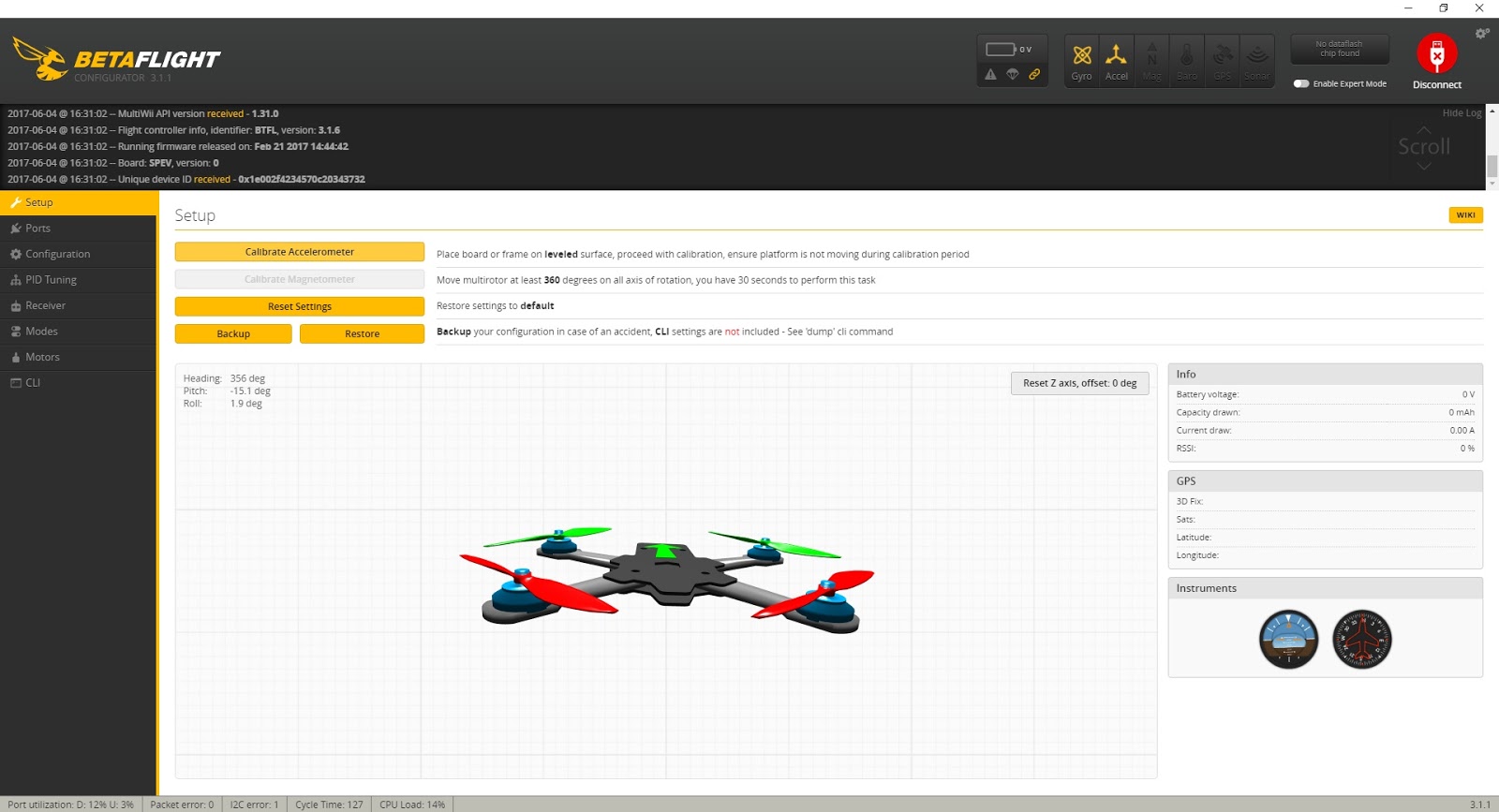
As Luca says - I’d take a look at the FC orientation, this is the most likely cause. Have you flipped, rotated or otherwise moved the FC out of it’s standard orientation? If you don’t know you could upload an image to this thread and we can take a look
Hmm, maybe not. When I dip it forward and backward the model in BetaFlight reacts accordingly so I had assumed it was right but I’ve just realised when I tipped side to side the model tips in the opposite direction.
I’ve just adjusted the settings so now it’s tipping the right way and will go try again.
The board itself has no markings to indicate which is forward and neither does the manual, I contacted UnmannedTech before I started the build and they provided in image saying this way foward so that is how I mounted it however that appears to be incorrect.
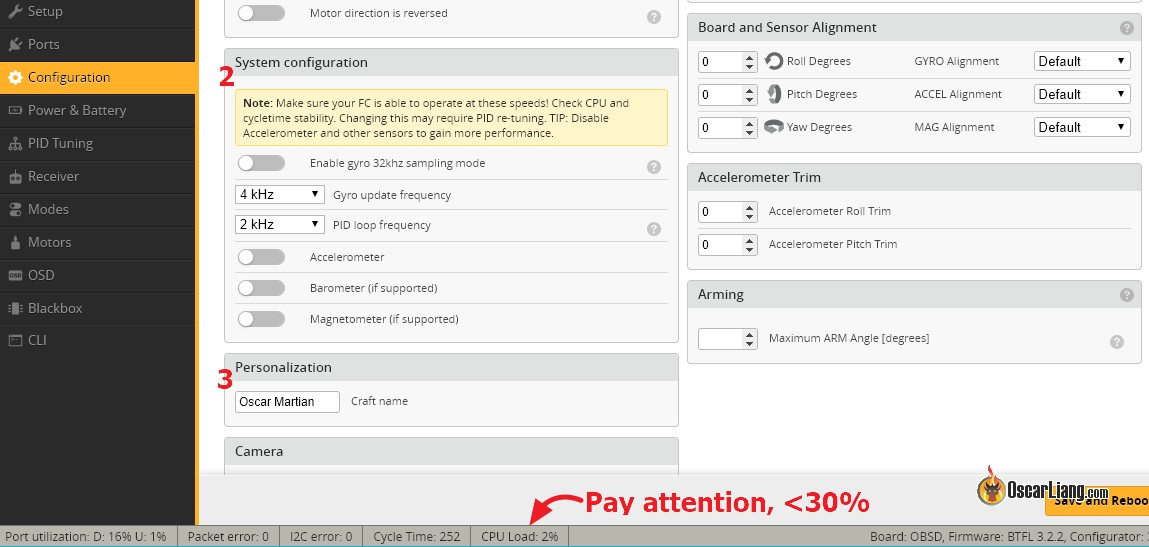
I’m currently messing about with the “Board and Sensor Alignment” settings in Betaflight but struggling to get a combination where the model correctly responds to changes in roll, pitch and yaw correctly at the same time, can get each one correct individualy but not all together
There where you have board alignment on yaw type in 90 instead of 0 and chceck if its correct if not check 180 or 270 if non of this will work i think you board is up side down
Finally got it working by adjusting roll by “180deg” and Yaw by “270deg flip”, not 100% sure what the says about the mounting of my FC but I think it’s upside down and back to front
Nice one :-). 99% of issues are cause by a strange setting, but great feeling when you finnaly get it working. Let’s hope you can have a successful flight now!