Hello everybody,
I am a newbie into the world of UAVs/multicopters and after reading and reading a lot of stuff and useful information I need to start sorting things out inside my head. Therefore, I need the help of the experienced guys to make sure that I am heading to the right direction. I hope that my engineering background (10 years professional experience in Computer Aided Engineering) will help me get into the UAV world much easier.
I want to build a UAV because I like learning and always getting around new technological fields (in the present case, the control theory science). Also, I find it quite fun and impressive to fly little machines that can have so many features.
As this will be my first quadcopter, currently I am interested to buy all the right stuff and assemble them all together. In the future, and after having some experience, only then I would like to start exploring new features or make some code development work for testing purposes.
So, here are my requirements for my quadcopter:
1)it should be able to reach speeds up to 100km/h
2)it should be able to fly for 25 or more minutes.
3)it should be able to follow objects. Particularly me, when I am driving my racing go kart on the track that reaches speeds up to 100km/h.
4)should be able to automatically take off and automatically land.
5)i should be able to program it to autonomously take off, follow a specific route path and then autonomously land.
6)should have a gimbal for a gopro in order to have smooth aerial video recording
7)it should have a 3km or more flight range
So far, I have decided to buy the DJI Flamewheel frame because of its durability. As a flight controller I decided to buy the PixHawk because of its power and flexibility in case I want to make additional expansions in the future or add new features to my drone or possibly write my own development code.
My questions:
- Do you find my frame and flight controller selection reasonable with respect to the requirements of the quadcopter I want to build ??
2)Based on your experience, could you suggest me the parts combo that I will need to buy in order to fulfill the requirements of my quadcopter ??? (ESCs, Props, motors etc ) The budget should be the minimum possible.
THank you very much,
Hi
To be honest to have a fast quadcopter and one that flies for a long time is usually abit difficult,
I have not personaly measured the max speed of the F450 frame but as you mentioned that this is your first quadcopter build I highly suggest you start of simple and cheaply and work from there as you get more familiar.
So my suggestion would be to start with the F450 frame, with MT2213 motors with 9x43 props, a 20A 4in1 ESC for the autopilot if you want something cheaper you should consider the minAPM v3.1, but our unmanned mini hawk kit is also great value if you want all the bells and whistles…
Regarding the speed and flight time, I do not expect to have a quadcopter that flies with 100km/h for 25 minutes continuously. I just mean that it should be able to follow a fast moving object with 100km/h for 1 minute maximum and then continue flying with more normal speeds of lets say 20km/h for the rest of the flight…
Regarding the flight range, is is possible to be controlled manually from me within a range of 3km ??? What radio equipment do i need ?
Also, regarding the autonomous flights, if we say that it flights with a constant 25km/h for 25 minutes, it means that it could cover about 10km distance… Would it be possible to send it 4km away from me and come back ?? DP i need specific equipment for this??
Thank you for your help…
Hey, usually to fly fast, you need powerful motors with use a lot of battery. But to get good flight times you need carefully selected motors that are efficient. It’s not impossible to combine both but its all about compromise between speed and efficiency. So its possible to build a 100km+ quadcopter with camera gear but it might not fly the entire 25min you require. But if you need help choosing gear let me know what you are thinking of and I can give feedback.
However in terms of flying 4km away its possible with some LRS radios but only if you are not around any people/builngs and you are not using the film for commercial purposes, otherwise you will need to get a licence.
However for your application you might find it better to actually use fixed with from with gimbal to follow you around the track as they can fly faster and further/longer. But definitely sounds like a cool application to make for some cool videos 
BTW you might enjoy this video 
Thank for your answer,
i will do my research and i will come back to you with the parts I decided to buy… and then you could guide me if my combination choice is correct and will fullfill my quadcopter requirements…
Regarding the flight range, of course i dont plan to use my quad for commercial purposes or fly it around people buildings. It will be flown on deserted areas… However, what parts do i need to buy to have such long flight ranges of 4-5km ???
Thank you
Dear Unmannedtech,
after some days of reading and research regarding quadcopters and their theory, I have decided to use the following configuration:
DJI Flamewheel F450 frame
ESC E-Max BLHeli 30A OPTO
DJI 2212-920KV
Gnauper E Prop 9*5
LiPo 10000mAh 15/30C 4S1P
CC3D or Naze32 Acro flight controller
- Do you find my selections proper ???
- From the above products, is there anything that could be swapped in order to improve my setup dramatically ??
- between CC3D and Naze32 Acro which one would you recommend ??
Thank you in advance…
Hi
All your options seem great except for the battery as I think it might be abit too heavy. What is the weight of the battery you plan to use?
In terms of the motors, I beleive the ones you are using will produce around 600g of thrust each, and when building a quadcopter you want to be able to hover at around 50% thrust the total weight of your quadcopter will need to be around 1.2Kg, I think that you will find that a battery around 3000-4000mah will be the biggest you can use with your setup.
Also my suggest would be to consider the flip32+ flight controller as its cheaper than Naze32 and has all the same features and more sensors such as barometer which makes flying much easier.
Dear UnmannedTech,
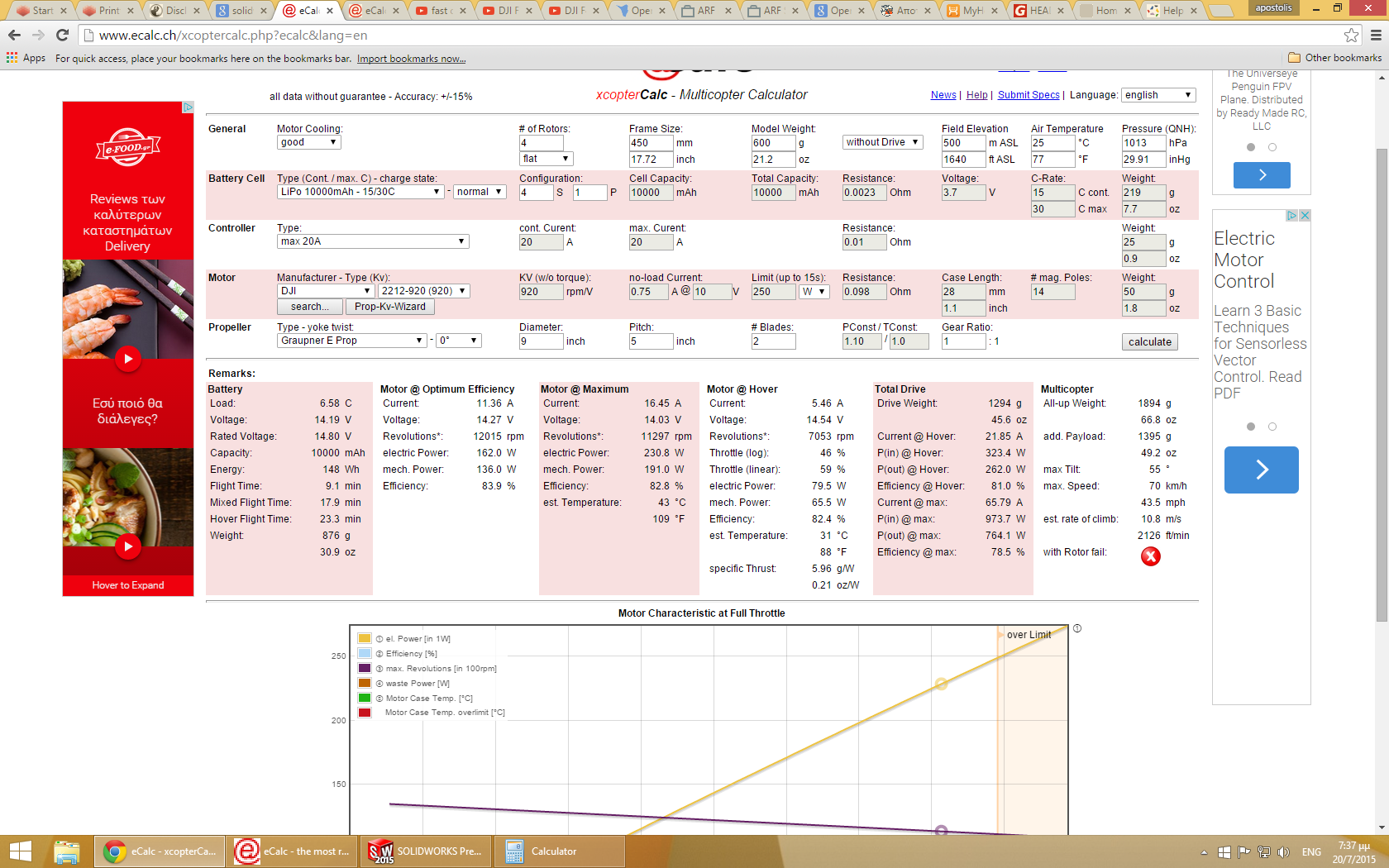
the battery i plan to use weighs 800g and it is 10000mAh 4S1P… I tested my combination using ecalc.ch tool, and in the attached image you can see the results… According, to ecalc it seems that there is no problem… I mean the speed is quite fast, and the flight times good…
I wouldnt like to use smaller battery because that would drop my flight times… Is there something else I could do, to keep the flight times and quadcopter speed as you see it in the attached image??
Thank you
If thats what it says on Ecalc maybe I am gettting wrong thrust values on your motors (we dont sell them so I am not sure about actual thrust values) But if you have the thrust specs please post them so I can check.
However one thing I did notice on your screenshot is that its saying the battey weight is 219g, so it might be worth going over everything again to double check.
Let me find the thrust values now and i will post them now immediately…
Regarding battery weight, the weight you see is the weight of one cell… If you multiply it by 4 it gives 876g…and it is also shown in the bottom under the remarks section for the batery… However, as i told you the battery i found weighs 800g…
here is a thread where someone tested DJI 2212 920KV motors with several props using 3S and 4S batteries… DJI E300 (2212/920KV) Motor Prop Testing - RC Groups
Thanks for pointing out the battery weight on ecalc  its been a long day
its been a long day 
Also according to the thrust results on the RC groups page you posted with a 4s setup and a similar size prop its showing only 330g of thrust at 50% and 636g at 75%. So the absolute maximum takeoff weight should be 4*630g=2.5Kg so your total weight is around 1.8Kg, that should be fine  , but you will not be able to add much extra weight such as camera etc… But the general rule of thumb is to try achieve hover at 50-60% thrust as that gives the motors enough thrust to react properly in case of strong wing gust etc…
, but you will not be able to add much extra weight such as camera etc… But the general rule of thumb is to try achieve hover at 50-60% thrust as that gives the motors enough thrust to react properly in case of strong wing gust etc…
Prop: iFlight iCF 9443 Carbon fiber DJI Hub Self Locking
4S (16.4V)
Throttle Volts Amps Watts RPM Thrust(g) Winding Temp (F/C)
25% 16.43 1.15 19 4285 133 80/27
50% 16.36 2.72 45 6270 333 80/27
75% 16.21 6.18 100 8537 636 84/29
100% 15.97 11.55 185 10460 994 123/51
THen maybe, i will try to find another motor which will have about the same KV (920) but more thrust and hopefully more Watts as well…
I am happy that I almost finalized my basic parts selection… However, I think I will need some help as well regarding the Radio equipment according to my needs… This is what i am reading about these days…
In terms of the F450 frame I think that is about as heavy as you can get, but its definitely a great platform to start with as its plenty capable to carry a gopro and gimbal. I usually dont suggest you start off with building a larger heavier frame if this is your first time building a drone.
In terms of radio gear my suggestion would be to go for the FRsky Taranis X9D as its accepted to be one of the best radios for FPV/Drone Pilots due to the extensibility. However we are also busy looking at a new radio from Radiolink which seems quite promising given the cheaper price with very similar features to to the taranis X9D.
THank you,
Regarding, the FRsky Taranis X9D tha you mentioned, how far will I be able to fly my quadcopter?? Flight range??
As I mentioned in my earlier posts, I am interested to be able to fly my quad far away from me in the future… Either by setting waypoints that the quadcopter should follow(with appropriate flight controller), either manually. In order to do this , do I need a UHF transmitter/receiver like EzUHF ??? If yes, are UHF transmitters compatible with FRsky Taranis X9D so that they can be attached on it ???
Depending on the receiver you use you can get about 5Km+ of range with the FRsky L9R receiver. However something like the X8R will give you about 2Km of range which is still great. So using stock Taranis is great as you dont need to go into any extra hassles of LRS systems. However in theory the range of your autopilot it unlimited since its all self contained, just depends on how long you can fly. But I must stress as I did before that something like this can be illegal depending on what country you are in.
Dear unmannedtech,
i did my first flight ever yesterday, which resulted in two fried motors. After my research, i decided to buy the following parts for my first quadcopter. Those are
DJI F450 frame with its extension legs
DJI E310 tuned propulsion kit ( 2312 motor, 420S ESC, 9450 props)
APM 2.6 flight controller with gps module
Multistar 10000mah 4S 10C battery
TURNIGY 9XR radio with FRsky DJT transmitter and V8FRii receiver
The quadcopter should be in the 1,5-2kg range of takeoff weight.
So, I tried to do my first ever flights by slowly hovering over the ground for 10-15 seconds in order to see how the quadcopter responds. I had a couple of turnover to the side of the quadcopter during landing but without damages as the speeds were slow. However, in my last effort, the quadcopter landed and felt to the side with the 2 props attaching to ground. All The props didnt stop spinning and after 3-4 seconds i saw smokes coming out of 2 motors. In my panic i turned off the radio but it kept spinning a little faster and then i unplugged straight the battery cable.
After going back home, i tested all the ESCs with the DJI assistant software using a good motor and the result message was “motor parameters are OK”.
- does that mean that my ESCs are indeed ok and i can use them again?
After my cross checks i will need 2 new motors.
So, i need to find what caused these 2 fried motors.
- in order to avoid cutting the long cable of the ESCs, i wrapped it around the quadcopter arm. Can this cause a fried motor?
- is there a chance that with the prop attaching to ground and the quadcopter keep working, the fried motor was caused by the fact that the ESC kept sending signal but the motor/prop couldnt follow???
4)is there a chance that the motors started overheating/frying while the quadcopter was on air? Is that possible according to my specs? DJI says that the E310 kit is suitable both for 3S and 4S batteries and for weights up to 2,5kg.
Could you please help me find my answers?
Thank you very much
So, I have some updates to my problems… After replacing the two faulty motors and setting up again my quadcopter, I tried again to make a flight in Stabilize mode in order to see how the quadcopter behaves… In my video you can see the attempts I have made
In all the attempts I was just gradually increasing the throttle channel without touching the yaw, pitch, and roll channels at all. Therefore, I would expect my quadcopter to start lifting vertically in an acceptable way without moving in other directions…As you can see in my video, the time just before the quadcopter starts lifting, it sounds like it cannot lift and also like vibrating and when it starts to lift, it also moves in forward or another direction. I checked the arducopter wiki pages, and I tried to recalibrate the radio but nothing changed…
Could you suggest me what causes this behavior and how can I correct this ???
I haven’t played with PID values and I’m using some default values. I also haven’t done any autotrim procedure. Is this needed ???
Just for reminding my setup is:
DJI F450 frame with its extension legs
DJI E310 tuned propulsion kit ( 2312 motor, 420S ESC, 9450 props)
APM 2.6 flight controller with gps module
Multistar 10000mah 4S 10C battery
TURNIGY 9XR radio with FRsky DJT transmitter and V8FRii receiver
AUW is 1,6kg
Thank you very much for your help
Thanks for sharing the video as it makes it much easier to see what is going on.
It does not look like there is anything wrong with your quadcopter. In stabilize mode, the quadcopter just tries to stay level but the slightest wind can cause it to drift like that. Also if R/C radio stick are not trimmed properly it can also case this behavior. When flying at low altitude the propellers generate alot of wind which is probably why your quadcopter is drifting like that. If you fly higher (around 1.5m above ground) you should see the quadcopter drift less if there is no wind. The best is to takeoff in GPS hold mode you should see that it will keep its position properly (assuming you have good enough GPS reception). However I suggest that you try this on an open field as flying on a rooftop can be abit small to fly if you have not had much experience flying a quadcopter.
thank you,
I have already had some progress with that… I fly in stabilize and AltHold mode in open air… I just need to perform the Auto/Save trim process in order to improve the lifting of my quad as much as possible… Then, I will test flight modes using GPS that would be much easier to fly…
Happy to hear that, if you have any other questions just let me know