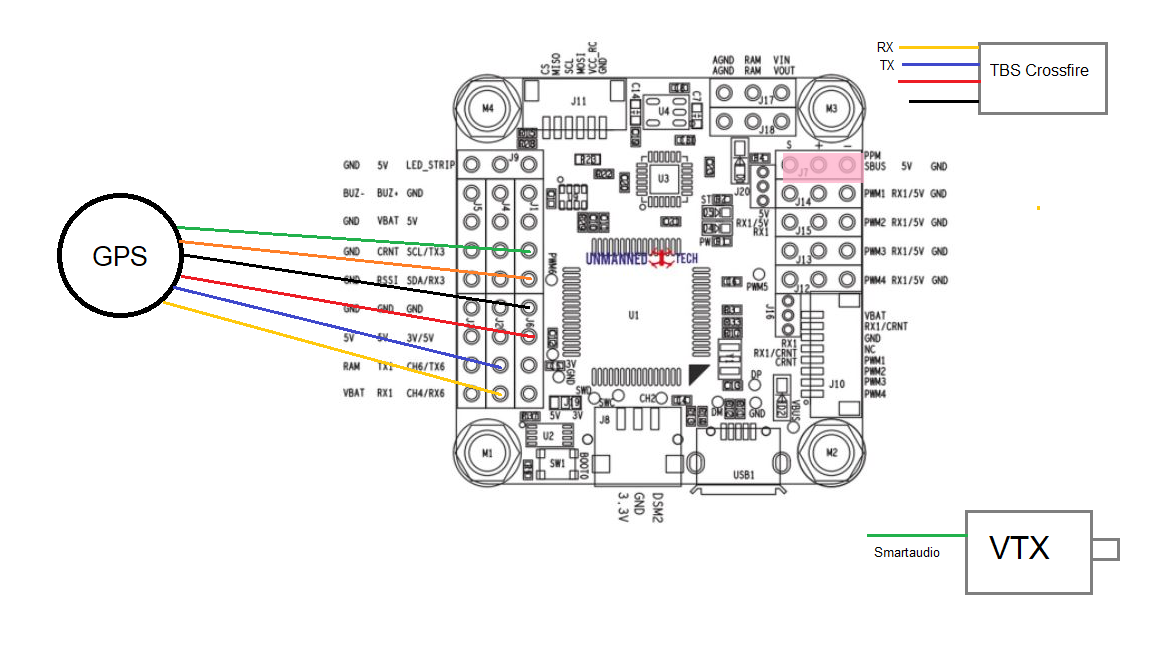
Just getting into this and am trying to convert my son’s Storm 240x racing drone that came with a CC3D FC to one that can support simple RTH so that he (well we!) can play a little more adventurously. Swapped the FC to an Omnibus F4V5, upgraded the Rx to 7 chan to get a RTH switch & installed iNav FW. Got it all working with the SBUS Rx on UART6. Added a M8N GPS on TX3/RX3 and got it working but I’m not sure where the SDA/SCL from the GPS mag goes as these connections seem to be on the same TX3/RX3 pins. I tried shifting the GPS to TX1/RX1 pins but iNav just rejects the selection of GPS as sensor on UART1 after reboot. Any idea what I am doing wrong? Is UART1 being used by another function?
The pre-arm compass calibrated light is green. Does this mean that the board has its own compass and perhaps I don’t need the GPS one for the basic RTH I need?
Regards
Richard
Read the internet again and spotted this thread
https://www.rcgroups.com/forums/showthread.php?3029971-GPS-on-Omnibus-F4-V5-Boards
Looks like the problem was that I had MSP still set on UART1. Switched MSP off, put the magnetometer into the SDA/SCL pins and it looks like its all working now.
Just wished I spotted the advice to calibrate the accelerometers before the board is wired up though…
Richard
Hi Richard
I have the same FC and although the GPS works fine the Magnetometer / Compass does not work, it is greyed out in Betaflight, I have the SDA/SCL wires connected to the right pins (see diagram) and have set TX3 and RX3 as IC2 resources.
Could you send me you GET MAG settings from your CLI so I can compare your Mag settings with mine by any chance?
Many thanks.
CLI output below.
Regards
Richard
get mag
align_mag = CW270
Allowed values: DEFAULT, CW0, CW90, CW180, CW270, CW0FLIP, CW90FLIP, CW180FLIP, CW270FLIP
mag_hardware = HMC5883
Allowed values: NONE, AUTO, HMC5883, AK8975, GPSMAG, MAG3110, AK8963, IST8310, QMC5883, MPU9250, FAKE
mag_declination = 0
Allowed range: -18000 - 18000
magzero_x = -90
Allowed range: -32768 - 32767
magzero_y = -206
Allowed range: -32768 - 32767
magzero_z = 39
Allowed range: -32768 - 32767
mag_calibration_time = 30
Allowed range: 30 - 120
imu_dcm_kp_mag = 10000
Allowed range: 0 - 65535
imu_dcm_ki_mag = 0
Allowed range: 0 - 65535
inav_auto_mag_decl = ON
Allowed values: OFF, ON
Hi, if you connect your GPS like this, can you use also a Frsky XSR smartport like showed in this blog? Omnibus F4 V5 Flight Controller Guide
New to this, just trying to use GPS and smartport. Any help is welcome! Using F4 Omnibus V5.1. Thanks, Chris