I am building a quad and assembled it up. Specs below
DYS 30A Brushless Speed Controller ESC Simonk Firmware for Multicopter
GT2205 2300KV Brushless DC Motor - Silver Cap (CCW Motor Rotation)
Flysky FS-i6X 2.4GHz 6CH AFHDS 2A RC Transmitter With FS-iA10B 2.4GHz 10CH Receiver
Flip32 OMNIBUS F4 Flight Controller
I am facing some serious issues which is stopping me to make the build a success.
Problem 1:
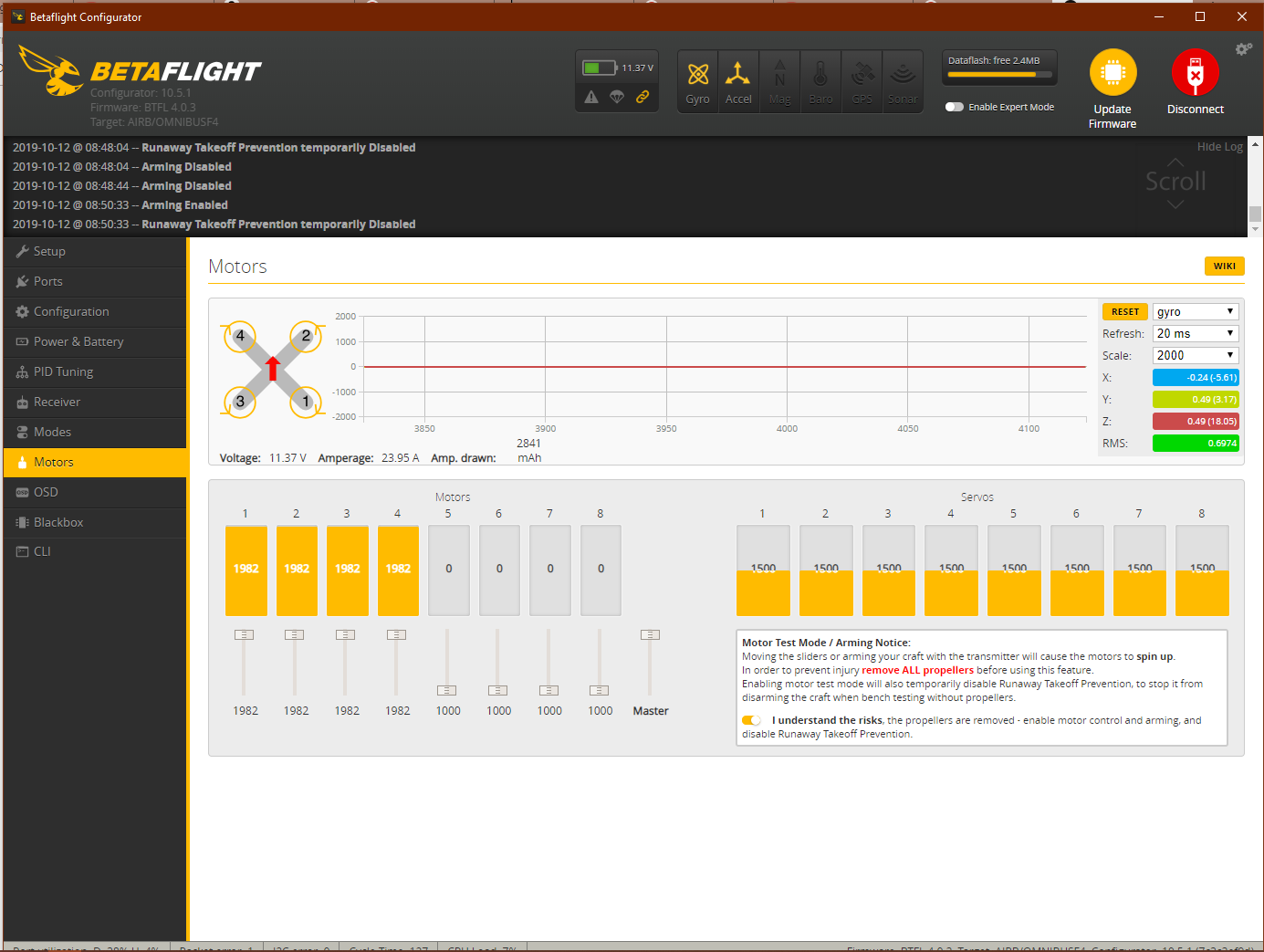
In the Motors tab of betaflight the motors only spin-up from 1980-2000 values
Problem 2:
When I arm the motors using the transmitter the initial state is following when the throttle is minimum.
Problem 3:
On increasing the throttle the values for only 2 motors go up and as the value to spin the motors i.e., Problem 1 is very high it finally ends up spinning only one motors.
Problem 4:
When I change the throttle on the transmitter all motors seems to stuck at their values forever doesn’t responds to throttle increase or decrease.
Can someone point me where or what has gone wrong and why its not working, I am struggling since last 4-5 weeks I have gone through lot of videos but unable to find a resolution.
Thanks in advance!!!
so in the motors tab in BF the motors do nothing untill you reach 1980. if this is correct .
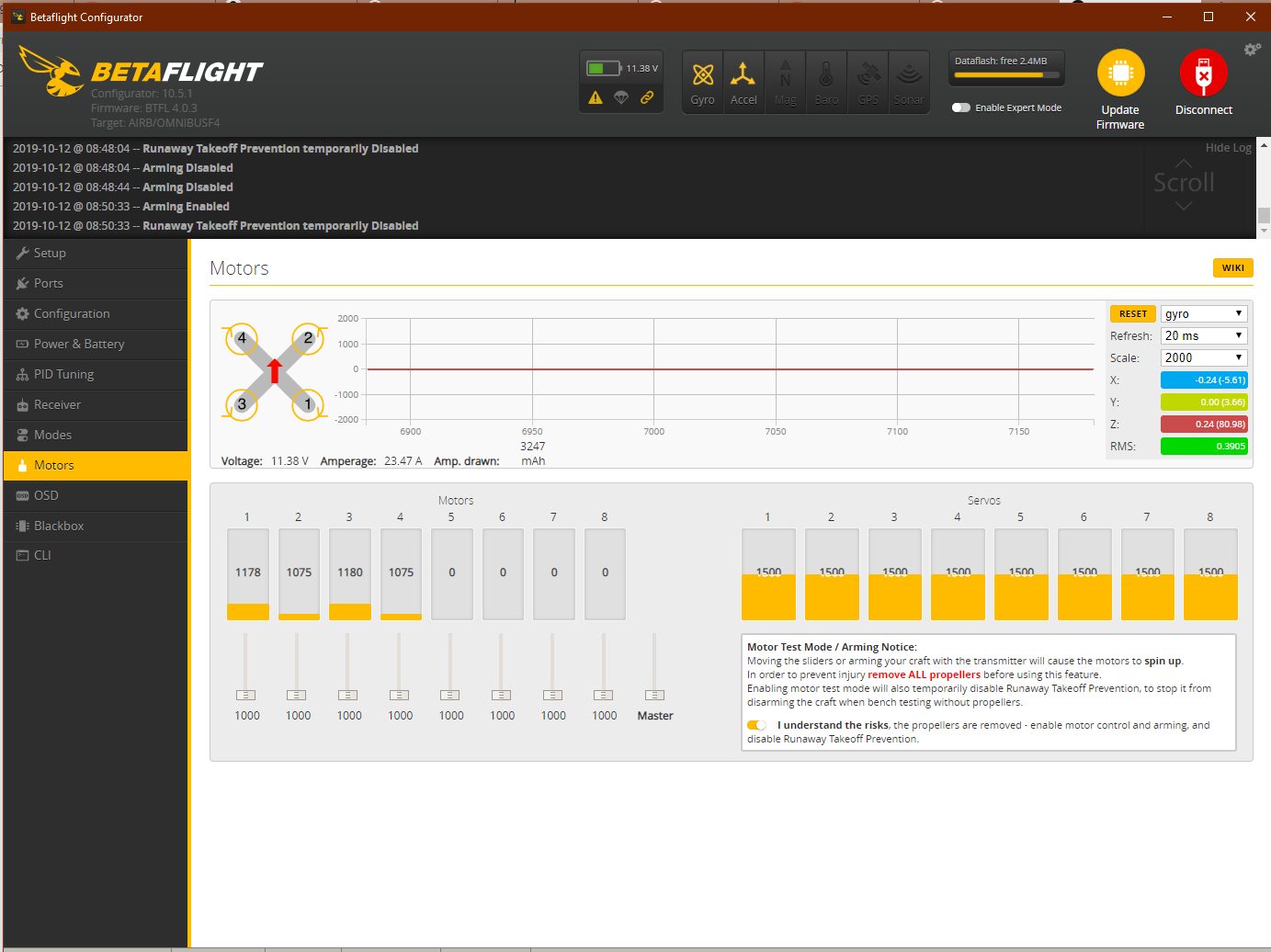
1st make sure esc input is set to pwm and min throttle is at about 1050 ish.
2nd calibrate ESCs with these i believe you need to plug battery in while transmitter switched on and throttle full ( props off ) when you hear a tone after the normal tones put throttle to min and wait for tone again, this should be instant ish. then unplug battery.
3rd when arming in BF dont worry about motor speeds,
4th as long as all motors start at same time and at about 1050 ish in the motors tab and all else ok should fly great.
1 Like
awesome it lifted off…I am thrilled…tomorrow test flight.
the only problem was
Blockquote 1st make sure esc input is set to pwm
Thanks a ton! This was pending since last 2 months…was unable to find the right settings…
Probably next would be fine tuning…any leads or links?
those ESCs are a old design and not to good. should be ok with those motors and FC.
Assume you a flying in angle mode for now forget fpv for the moment.
make sure all centre points on receiver are 1500, when in air in angle mode give it full left and right roll and make sure it doesent wobble when comes back level, same in pitch.
if it wobbles for now just adjust the P reduce to half of what it is if its worse put it 25% more that what is was originally.
if it dont wobble get you goggle on a practice practice practice, probably a good idea to set a little expo on also say 0.20 to 0.30 just to make it less twitchy while learning.